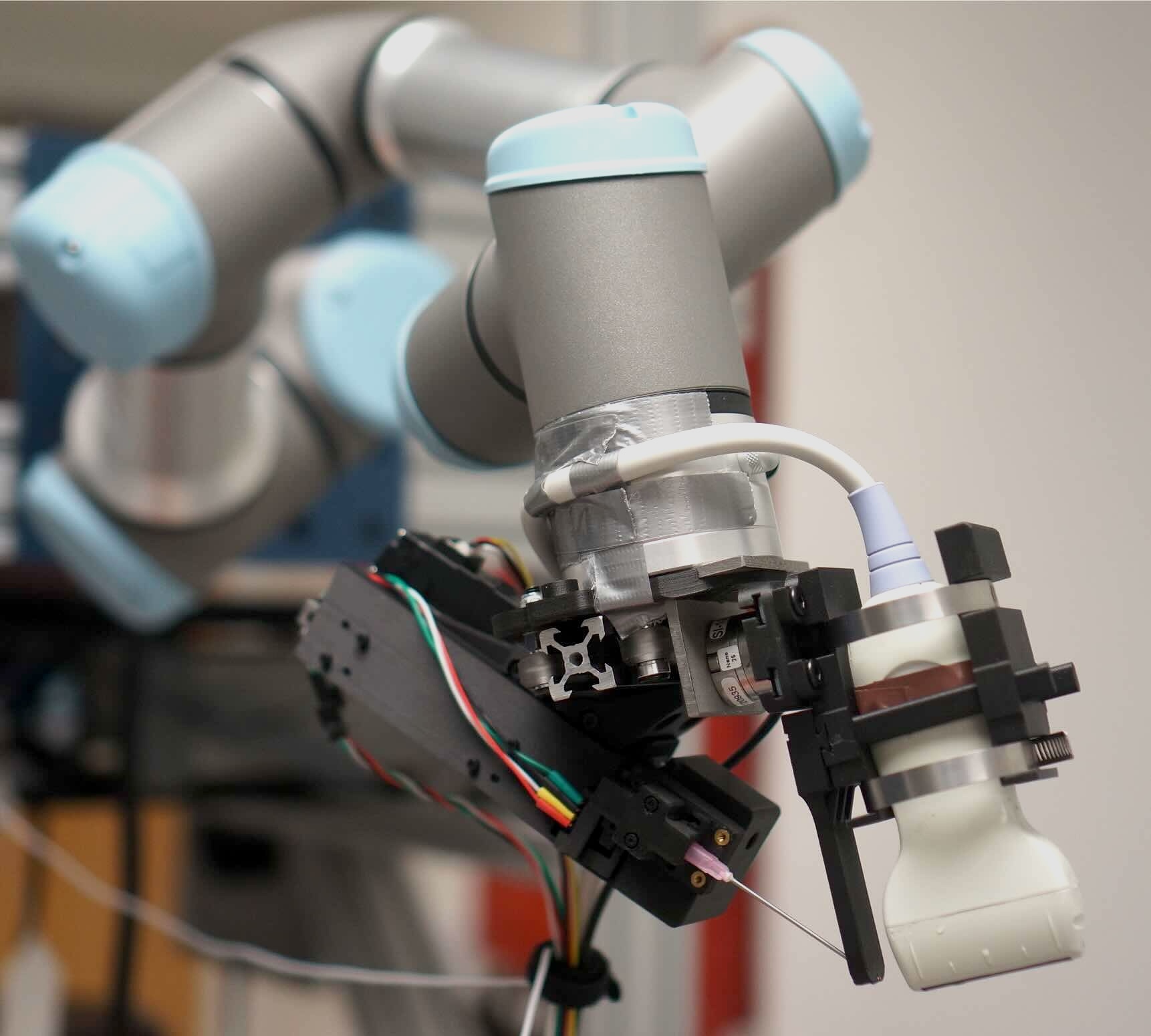
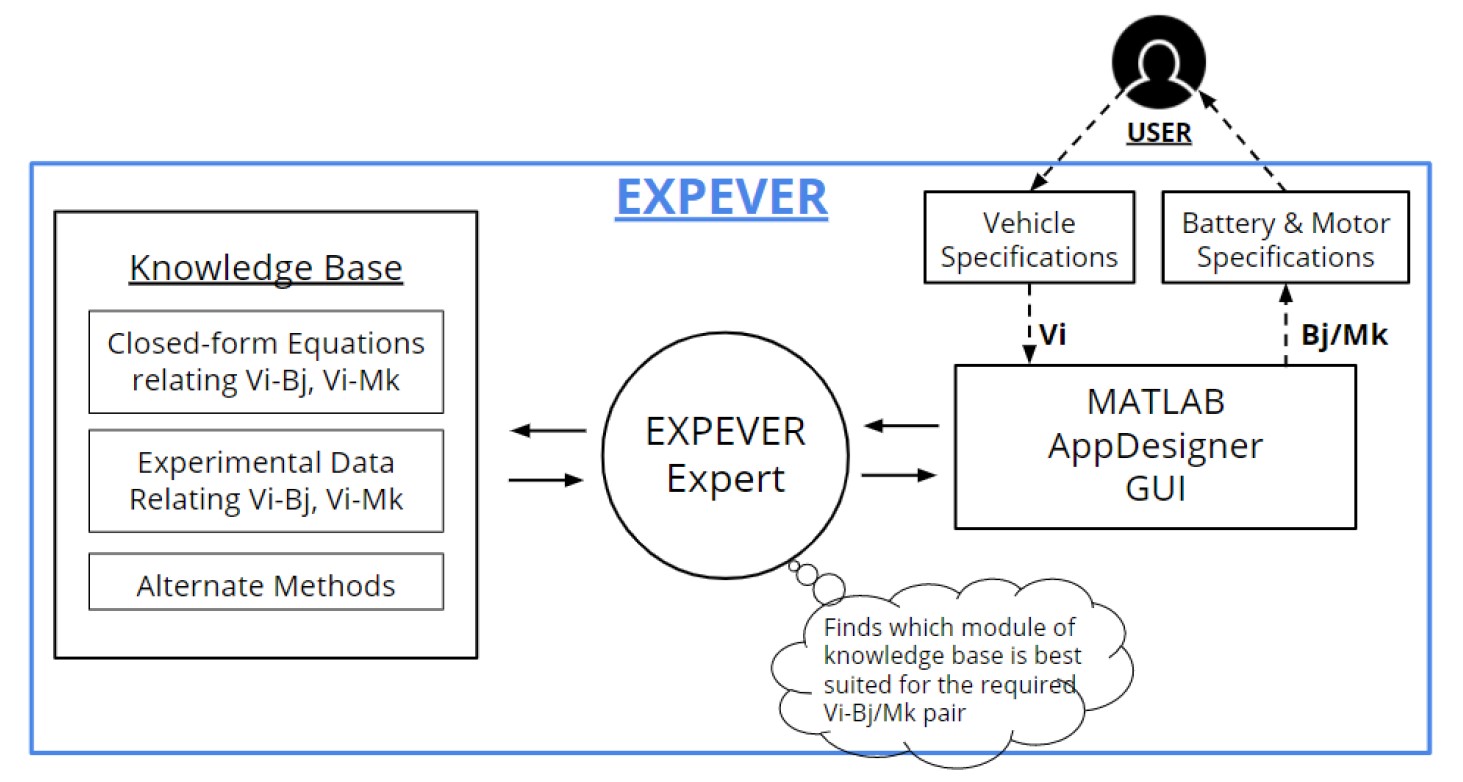
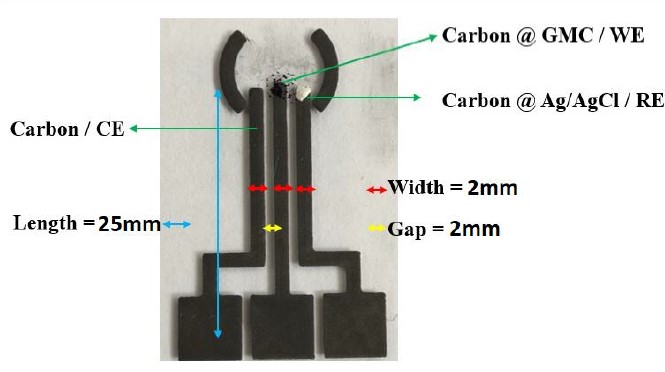
Projects Show All9 Aerial2 Bio-Inspired3 Construction1 Embedded systems2 Manipulation1 Mobile Robots1 Others4 Robotics9 Surgical Robots1 Large-scale Autonomous Robotic Construction Motion Planning and perception for a large-scale 3D concrete printed construction robot during my internship at Diamond Age 3D. MPC TrajOpt for Quadrotor Subcanopy Flight RRT + minimum snap trajectory and non-linear MPC controller with convex obstacle constraints for fast flight in forest subcanopy. High-altitude Wildland-fire Infrared Crew detection Comprehensive dataset of Wildland Fire Infrared images with crew labels for the enhancement of wildfire crew detection - published to IROS 2023. Hierarchical Task and Motion Planning Hierarchical planning using task-level STRIPS + A* search and execution with DMPs for household robotic manipulation. NASA-JPL Exobiology Extant Life Surveyor Constrained optimization for gait generation in autonomous, self-propelled snake robot to travese icy crust of Saturn's moon Enceladus. Autonomous Ultrasound-guided Needle Insertion for Battlefield Trauma Care Novel vessel puncture recognition device validated on experiments in surgical pig labs. Snake-like Robots for Search and Rescue ROS-based software stack to control Biorobotics lab Snake Robots; Firmware development for snake head perception module. Solar Electricity Generation Forecasting Using neural networks for weather based solar electricity forecasting. EXPEVER Expert EV/HEV Prime-mover Selection System (EXPEVER) is a MATLAB based intelligent selection system for EV/HEV prime-mover parts. Coefficient of Drag using Accelerometer Drop Test A low cost, easy to setup drop test procedure to calculate the drag coefficient of a model aircraft. Fabrication of Microfluidic Electrochemical Sensors Low-cost, portable dianostic electrochemical sensor using 3D carbon ink extrusion on glass substrate. ALFA - APTRI Labs Floor Assistant ALFA is an open-source internet controlled mobile robot developed during my summer internship at Adani Power. Dextroid-The Humanoid An 8-DOF Bipedal Humanoid designed to be low-cost and enable fast prototyping, with easily replaceable off-the-shelf parts.